
Stanford EE259 I 2023 I Lecture 12 (Extra Session)
28 Jan 2024 (2 years ago)
Fundamentals of Radar Systems
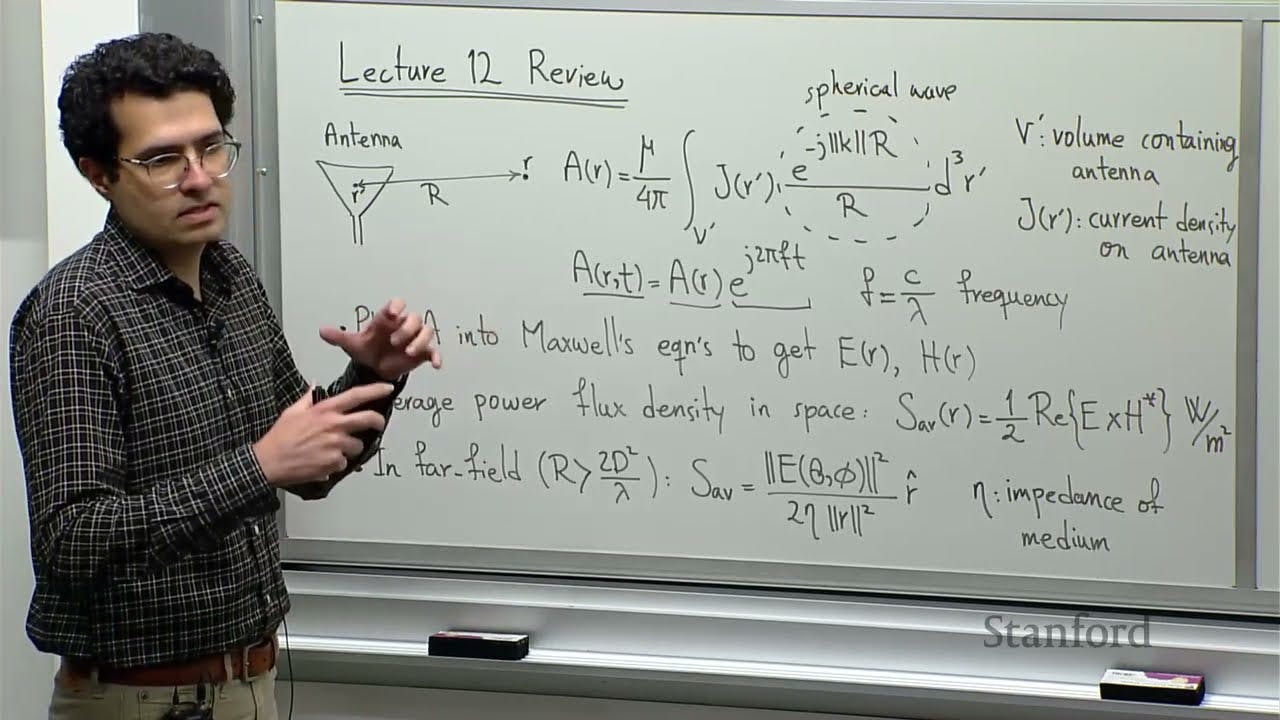
- The basics of antenna theory, including calculating electric and magnetic fields and finding radiated power density.
- Understanding radiation efficiency and directivity of an antenna.
Radar Range Equation
- Calculation used to determine the maximum range that a radar system can detect.
- Factors considered in the equation: transmit power, antenna gain, target radar cross section, and system losses.
Types of Radar Systems
- Pulse radar and continuous wave radar.
- Single-input single-output (SISO) and multiple-input multiple-output (MIMO) systems.
- Differences and applications of each system in robotics and autonomy.
Frequency-Modulated Continuous Wave (FMCW) Radar
- Introduction to FMCW radar and its usage in robotics.
- Discussion on how FMCW radar works and its application in estimating range and velocity using the Doppler effect.
Performance of Radar Systems
- Range, resolution, field of view, and velocity estimation capabilities of radar systems.
- Mention of a commercially available chip for FMCW radar and its integration into a radar system.
Introduction
- Discussion on the signal model involving the complex conjugate of a received waveform multiplied by a transmitted waveform.
- Simplification of the model by expressing it as complex exponentials.
Doppler Shift and Range
- Explanation that the instantaneous frequency of the signal includes contributions from both target range and velocity.
- Proportional relationship between Doppler shift and radial velocity.
- Complexity in interpreting the frequency due to coupling between range and velocity.
Decoupling Range and Velocity
- Mention that coupling between range and velocity is typically insignificant in robotic applications.
- Doppler shift is usually much smaller than the frequency shift from range.
- Demonstration with specific numbers to show the negligible Doppler shift.
Simplifying Range Estimation
- Explanation that in FMCW radar, the frequency of the intermediate frequency (IF) signal is assumed to be equal to the frequency shift from range.
- Estimation of range by multiplying the frequency shift by the speed of light and dividing by twice the bandwidth.
Multiple Targets
- Discussion on extending ranging estimation technique to multiple targets.
- IF signal being the sum of individual IF terms corresponding to each target, with different frequency shifts proportional to their ranges.
- Visualization with an example of three targets hit by a wide radiation pattern.
Conclusion
- Concluding the video and mentioning the continuation of the discussion in the next installment.
- Inviting the audience to ask questions.
