
Stanford EE259 I Lidar range and direction of arrival estimation I 2023 I Lecture 18
03 Feb 2024 (2 years ago)
Photodiodes
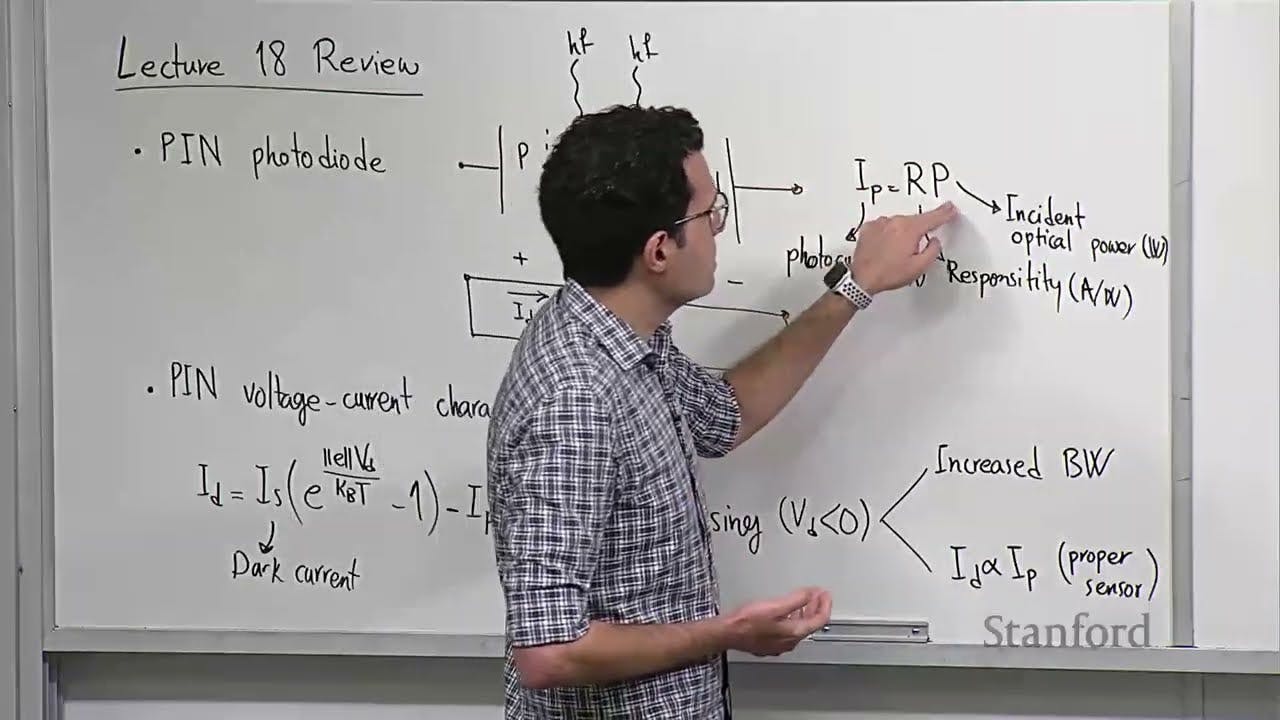
- Pin photodiodes are used to detect light in lidars.
- The intrinsic material in a pin photodiode generates photocurrent when photons are absorbed.
- The total current through a pin photodiode is the sum of the dark current and the photocurrent.
- Reverse bias is applied to eliminate the dark current and make the total current proportional to the photocurrent.
- The voltage-current characteristic of a pin photodiode can be divided into three regions: forward bias, reverse bias, and breakdown.
- In the reverse bias region, the pin photodiode can operate in three modes: photoconductive, non-linear, and Geiger mode.
- The photoconductive mode offers a linear response with a responsibility of around 1 A/W.
- The non-linear mode, also known as avalanche photodiode (APD) mode, provides high responsivity but with a non-linear response.
- The Geiger mode, achieved by operating beyond breakdown voltage, offers infinite responsibility but has an on-off switching behavior.
Biasing and Signal Processing
- Photodiodes can be biased in three different modes: photovoltaic, photoconductive, and Geiger mode.
- Reverse biasing a photodiode with a negative V bias results in a linear response.
- A transimpedance amplifier (TIA) is used to achieve a constant negative bias voltage and convert the current generated in the photodiode to a voltage.
- The output of a TIA is a voltage type output, which is compatible with ADCs for digitization.
- The frequency response of a TIA is a low pass filter with a cutoff frequency Omega zero.
- The output voltage of a TIA is the inverse Fourier transform of the frequency response multiplied by the Fourier transform of the incident optical power.
Direct Detection Lidar
- Direct detection lidar (TOF lidar) uses a single photodetector and detects the received optical power.
- Direct detection lidar is simpler in hardware and algorithms and is more commonly used in autonomy.
- State-of-the-art direct detection lidar can see up to 400 meters, with an average range of 150-200 meters.
- Range resolution is typically a few centimeters, and the field of view can be up to 360 degrees horizontally and 50-70 degrees vertically.
- DOA resolution can be as good as 0.05 degrees, and the measurement rate is typically 10-30 Hertz.
- Direct detection lidar systems typically consume a few tens of watts.
- Direct detection lidars cannot measure velocity because the Doppler shift is lost in the detection process.
- Different pulse shapes can be used in direct detection lidars, but typically, short pulses are used to achieve high resolution.
Coherent Detection Lidar
- Coherent detection lidar detects both the amplitude and phase of light using a coherent optical receiver.
- Coherent lidar achieves better SNR than direct detection lidar because the signal is proportional to 1/R for coherent lidar and 1/R^2 for direct detection lidar.
- Coherent lidar systems send very short pulses (3-10 nanoseconds) and wait for echoes, similar to pulse radar.
- Coherent lidars use phase or frequency modulation instead of amplitude modulation like direct detection lidars.
- Coherent lidars are usually monostatic, using the same optics for transmission and reception.
- A beam splitter or circulator is used to separate the transmitted and received signals.
- The coherent receiver mixes the received signal with a local oscillator to obtain a complex electrical signal proportional to the full electric field.
- Coherent detection uses multiple photodiodes to extract the real part of the complex electric field.
- Combining the outputs of these two balanced photodetectors provides a full IQ receiver for coherent lidar.
- The 90-degree optical hybrid is a passive device that generates the four outputs required for the balanced photodetectors.
- Coherent lidar can transmit and receive complex signals, which enables the use of the same waveforms and DSP techniques as in radar.
- FMCW and PMCW lidars can be built using coherent lidar technology.
- Coherent lidars continuously transmit periodic waveforms and can use frequency chirps (FMCW) or ranging codes (PMCW) for range and Doppler estimation.
Lidar Signal Processing
- Lidar and radar signal processing algorithms are similar because they use the same signal model and estimate the same parameters.
- Lidar beams are much narrower than radar beams, making lidar DSP easier as it can assume there is only one target in the signal.
- Doppler shifts in lidar are much higher than in radar due to the shorter wavelengths of lidar.
- The high Doppler shifts in lidar make it difficult to ignore Doppler and only use phase shifts for estimation, unlike in radar DSP.
