
Stanford EE259 I MIMO imaging radar, direction of arrival est, target detection I 2023 I Lecture 13
29 Jan 2024 (almost 2 years ago)
Introduction
- Introduces the concept of slowly enough term that doesn't affect the output of correlators.
- Explains the accumulation of code words and the use of FFTs to obtain a range Doppler map.
Radar Target Detection
- Radar Target Detection operates on range velocity maps.
- Targets are visualized as strong peaks on the range velocity map.
- Target detection distinguishes real targets from noise or clutter.
- Different thresholding techniques can be used, such as fixed thresholding or C4 thresholding.
- The goal is to have a high true positive rate and a low false positive rate.
- Adaptive thresholding, like C4, is recommended for more complex scenarios.
Direction of Arrival Estimation
- Direction of Arrival Estimation also operates on range velocity maps.
- The focus is on determining the direction of the targets.
- The range velocity map helps in identifying the presence and location of targets.
- The math behind C4, which calculates per-cell thresholds based on the average of surrounding cells, will be explained in the next session.
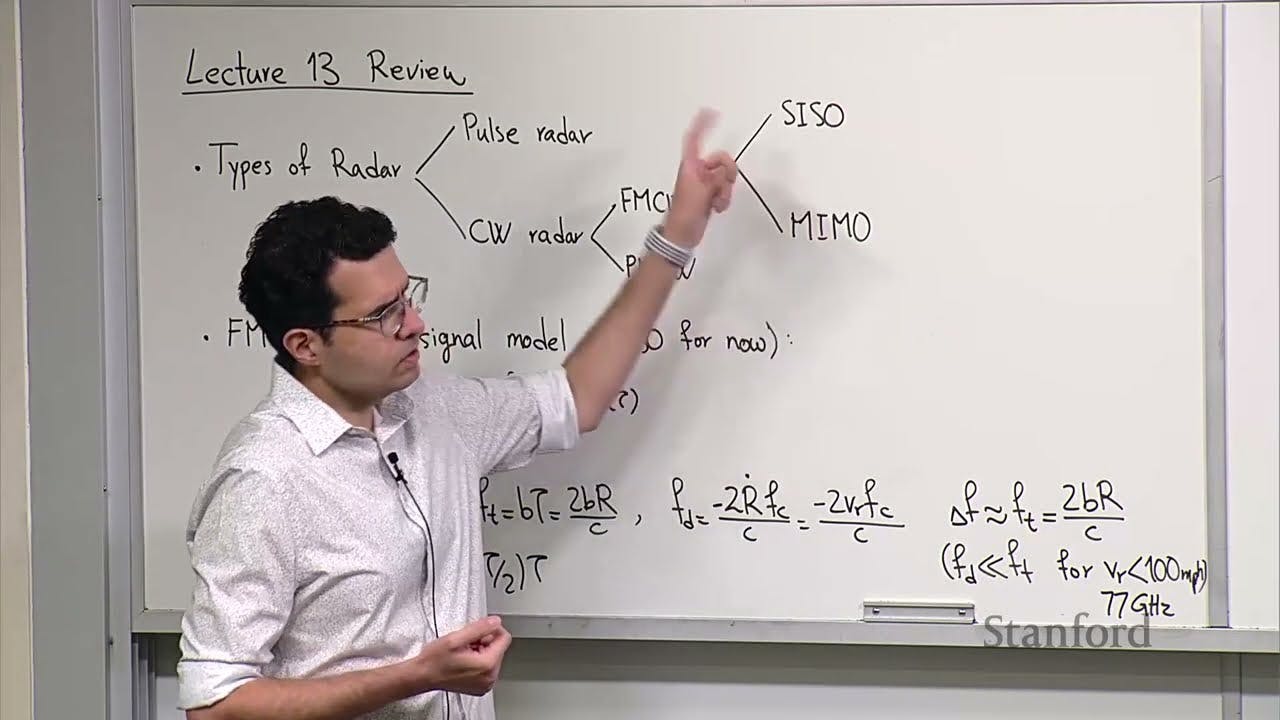
Introduction to Radar Types
- There are two main types of radar: pulse radar and CW radar.
- FMCW radar and PMCW radar are commonly used in autonomous robotics applications.
Signal Model for FMCW Radar
- The signal model for FMCW radar involves a complex equation that includes factors such as gain, attenuation, frequency modulation, and phase.
Range and Velocity Estimation
- Range estimation in FMCW radar involves taking a Fourier transform of the IF signal to find peaks at frequencies proportional to the range of targets.
- Velocity estimation in FMCW radar involves analyzing the phase difference between consecutive chirps to calculate the Doppler shift and, subsequently, the radial velocity.
Multiple Targets
- The signal model can be extended to multiple targets by summing the individual IF signals for each target.
- The range and velocity estimation algorithms remain the same but are applied to each target separately.
Range and Velocity Resolution
- Range resolution is determined by the width of the FFT bins and is proportional to the sampling rate.
- Maximum range is determined by the maximum frequency that can be distinguished in the FFT.
- Velocity resolution is determined by the width of the Doppler bins and is inversely proportional to the frame duration.
- Maximum velocity is determined by the maximum frequency that can be distinguished in the Doppler FFT.
Configurable Parameters
- Parameters such as carrier frequency, slew rate, chip duration, ADC sampling rate, and frame duration can be configured to optimize radar performance for specific applications.
- Trade-offs between range, velocity resolution, and maximum range and velocity need to be considered when selecting these parameters.
PMCW Radar
- PMCW radar uses phase modulated continuous waveforms instead of frequency modulated waveforms.
- The basic principles of range and velocity estimation in PMCW radar are similar to FMCW radar but with different waveform characteristics.
- However, PMCW radar is not as widely deployed due to the higher power consumption and cost of the required high sampling rate ADCs.
Overall, the video provides an overview of the key concepts and techniques involved in range and velocity estimation in radar systems, with a focus on FMCW radar.
