
Stanford Seminar - Embodied Intelligence for Extreme Environments
01 Mar 2024 (almost 2 years ago)
Embodied Intelligence for Extreme Environments
- Embodied intelligence for extreme environments involves designing robots that can withstand extreme conditions such as pressure, temperature, and radiation.
- Traditional robotic exploration is limited by the need for advanced controls, sensors, and computers, which can be costly, heavy, and power-hungry.
- Soft robotics offers an alternative approach by using compliant materials and structures to achieve strength and adaptability.
Soft Robotic Grippers
- Elastomeric fluidic actuators and gecko-inspired adhesives are two complementary technologies for gripping objects in space.
- A model was developed to design soft robotic grippers that maintain even surface pressure distribution across an arbitrary object.
- Researchers developed a gripper with gecko-inspired adhesives that outperforms similar grippers without the adhesives.
- The gripper's performance depends on the size of the object being gripped, with better performance on larger objects.
- The gripper enables new grasp options, such as hybrid grasps where one finger provides normal force and the other provides surface adhesion.
- The gripper can lift objects with forces comparable to state-of-the-art grippers, but at lower pressure, which maintains flexibility and scalability.
- The researchers scaled up the gripper design for potential use in capturing and refueling satellites.
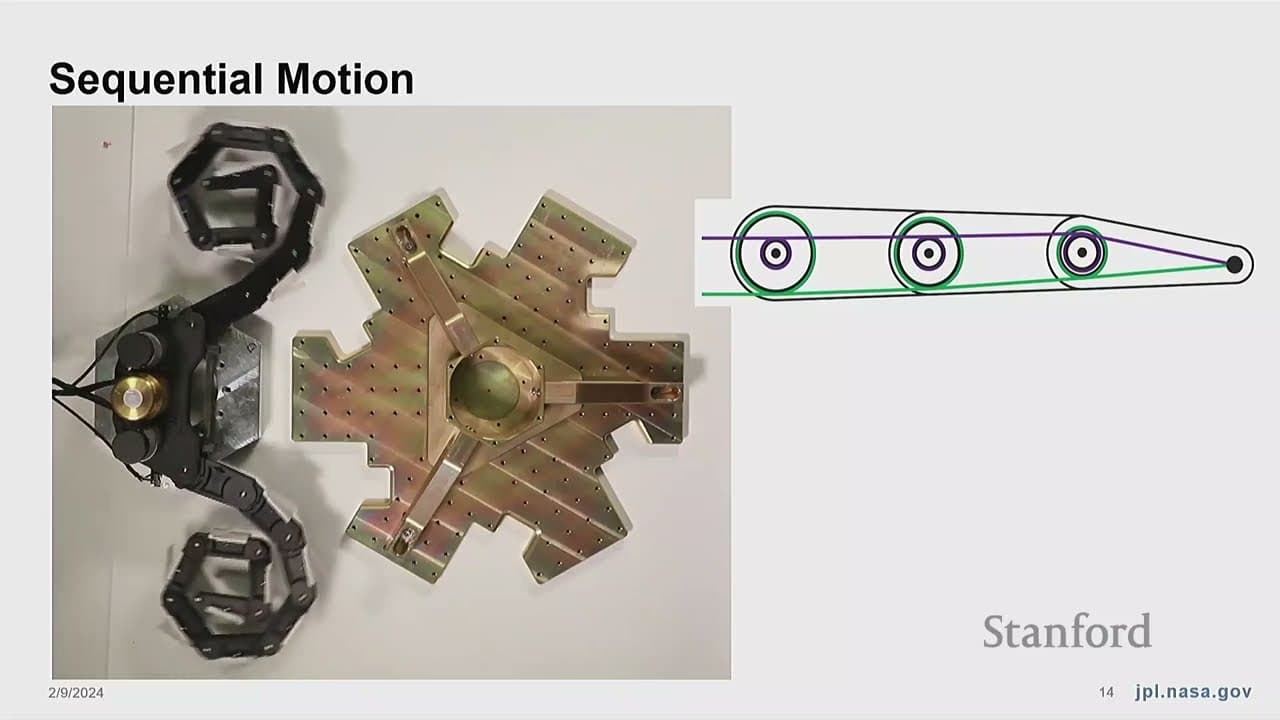
- The gripper uses a sequential deployment mechanism to conform to unknown surfaces, but stability becomes more challenging with more joints.
- Surface friction has a positive effect on stabilizing grasps, allowing the gripper to engage and torque down onto surfaces without losing contact.
- The gripper's compliant design allows it to wrap around arbitrary shapes without damaging them.
Vine Robots
- Vine robots offer a potential solution for exploring coral reefs due to their simple deployment mechanism and ability to squeeze through tight spaces.
- Vine robots are soft, inflatable robots that can navigate through cluttered environments.
- The robots are made of a flexible material that can buckle and deform under low pressure.
- This flexibility allows the robots to interact with their environment and reinforce their structure.
- The robots can be trained on known examples to improve their performance in unknown environments.
- Vine robots can be used for gripping and anchoring in constrained spaces.
Cold Arm
- Cold arm is a project that aims to reduce the thermal power consumption of robotic arms in cold environments.
- Cold arm uses bulk metallic glasses that maintain their elasticity and flexibility at very cold temperatures.
Ice Node
- The Ice Node project is a drifting robotic vehicle designed to study ice shelves and reduce uncertainty in sea level rise projections.
- Ice Node uses its buoyancy to control its depth and drift along currents beneath the ice shelf.
- The vehicle lands on the ice using a pyrotechnically severed ballast and compliant legs to absorb any differences in ice conditions.
- After a period of data collection, Ice Node detaches from its legs and returns to neutral buoyancy to drift back out to open water.
