
Stanford Seminar - Flying Robots: Exploring Hybrid Locomotion and Physical Interaction
16 Feb 2024 (2 years ago)
Hybrid Aerial-Aquatic Flapping Robots
- The speaker's research focuses on developing hybrid robots that can fly and swim underwater.
- Key challenges include the water exit, trajectory planning, waterproofing, and optimizing the sailplane's wings.
- Flapping robots offer sharp turn rates and can take off from the ground with assistance or by hand-throwing.
- Dismounting from a perch requires further research, with options such as falling, incorporating a jumping mechanism, or increasing flapping wing power.
RoboBee
- The RoboBee is a 175-milligram robot that can come out of the water and fly.
- It uses electrolysis to generate hydrogen and oxygen, which are then ignited to create a spark and initiate combustion.
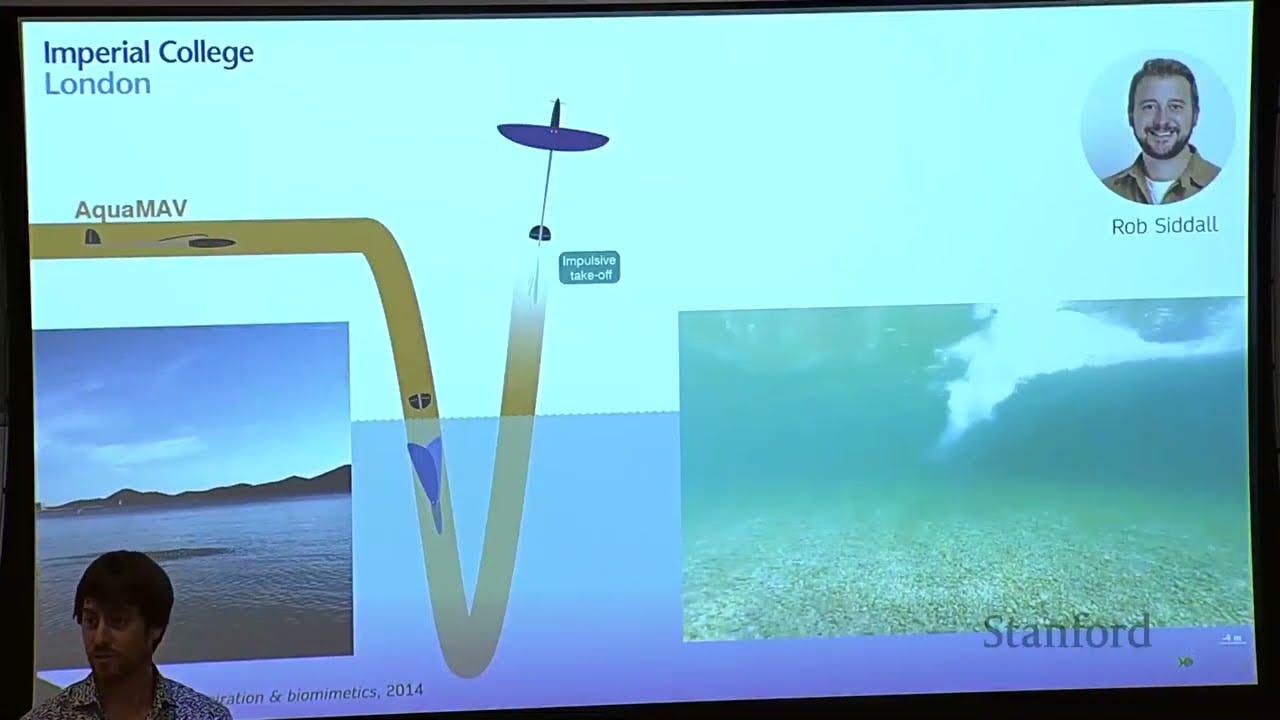
ACAV
- The ACAV is a larger-scale robot that can dive headfirst into the water and then launch back into the air using a gas cartridge.
Jump Glider
- The Jump Glider is a robot that can jump multiple times out of the water and then glide to extend its distance.
- It uses calcium carbide and water to create acetylene gas, which is then ignited to create pressure and push the water out of the tank, propelling the robot out of the water.
SalMAF
- SalMAF is a robot that can land on the water, pivot its wings upwards for sailing, and then take off again.
- Its wings are split into three segments, with the center segment being a high-performance profile and the outside panels being symmetric for equal force generation during sailing.
- The same wings and control surfaces are used for both sailing and flying, reducing the number of actuators needed.
Medusa
- The Medusa project involves a dual-agent robot that can fly, land on the water, and deploy a tethered underwater agent with live video capabilities.
Flapping Flight Advantages
- Flapping flight is safe, quiet, bio-inspired, highly maneuverable, and can fly at high angles of attack while remaining efficient.
Perching Robot
- The robot has a 1.5 m wingspan, weighs 500 g, and can carry an additional 500 g payload.
- It has a minimal forward velocity of 2 m per second.
- The robot has a modular design for easy repair and modification.
- The claws can close very quickly (within 25 milliseconds) and have a high grasping force to stay on the branch.
- The robot has a line scan sensor in the front of the claw for vision, which can process 200 Hz vision feedback on a microcontroller.
- The robot can fly at 4 m/s and perch on a branch in real time.
